Research
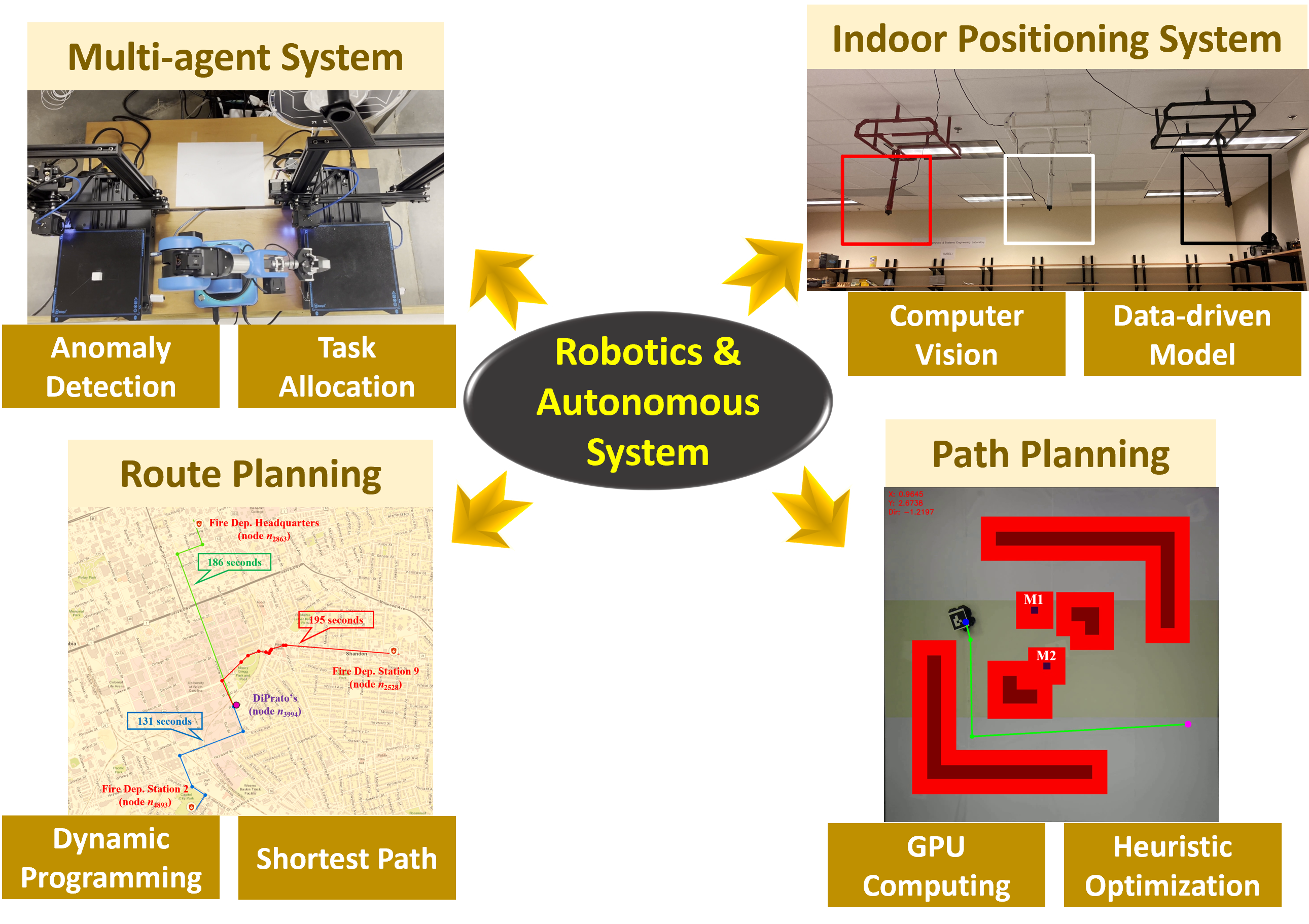
My research focuses on edge/GPU computing, path planning, computer vision, optimization, and machine learning. Given the computational demands of many tasks, I am developing efficient algorithms that can be implemented on edge devices, and leveraging GPU computing to accelerate the computation process. My ultimate goal is to improve the performance and autonomy of robots across various domains, including manufacturing, healthcare, and space exploration.